Theseus
|
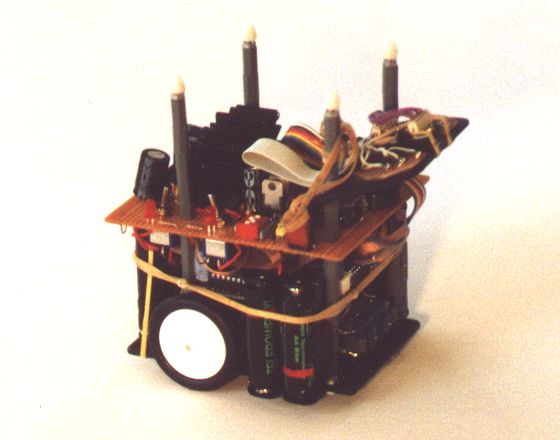
I was experimenting with the GameBoy camera and the Mini RoboMind
(MRM) computer when the Seattle Robotics Society
began plans for a line maze contest.
I decided to build a line maze robot using the camera.
I knew this was doing it the hard way,
but I wanted an excuse to play with vision,
and following a line should be simpler than other kinds of vision.
Doing things the hard way may be an interesting challenge, but it's not the way to win contests. If conditions are just right Theseus can go through the maze with no problems. But he fails completely if the lighting isn't just right, or if he has his back to the main light source and the camera is seeing his own shadow, or if he sees a reflection in the maze surface, or if the phase of the moon isn't just right... I have also built an attachment for it with three cameras for stereo vision experiments. What is he made of?
|
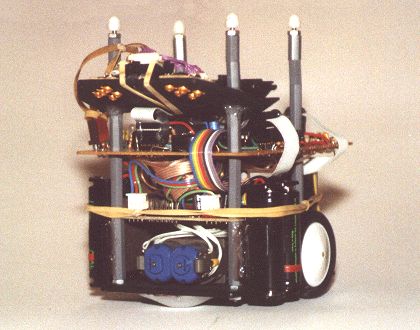
Theseus from the front.
Crazy Legs Egg Sucker
ERC
Hexex
LC
Mutant
Speedy
Theseus
Thumper
T3
Egg Sucker
ERC
Hexex
LC
Mutant
Speedy
Theseus
Thumper
T3
Back to Robot Projects
Back to Home
Fractal Creations
K'nex Creations
Site Index
Privacy Policy
Copyright
Contact
Copyright 1994 -
Gary Teachout